2013 Ultimate Ascent
The Challenge
2013 Ultimate Ascent Game Animation
Team 4201
JUst the Beginning
Ultimate Ascent was played by two competing alliances on a flat, 27 x 54 foot field. Each alliance consisted of three robots, and they competed to score as many discs into their goals as they could during a two minute and 15-second match.
The Robot
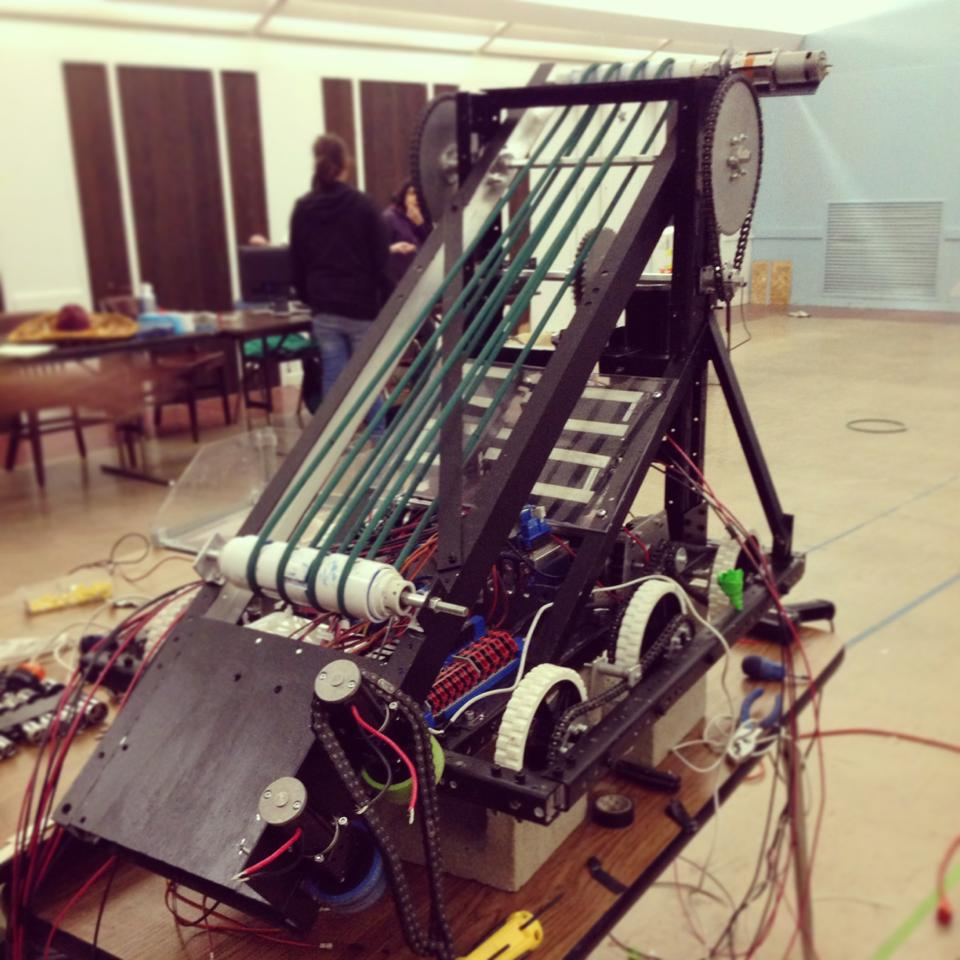
Name: Leo’s Army
Weight: 116 lbs
Size: 48”H x 31”W x 27.5”L
Strategy: This robot’s strategy was mainly offensive. During autonomous mode, Leo was programmed to score two disks into the 2-point Frisbee slot. During teleop, the robot was able to drive to the loading station to receive disks and shoot them into the 2-point slot using a pair of high-speed rotating wheels at the end of its arm. At the end of each match, Leo used a pair of U-bolts mounted near the base of its arm to hang onto the first level of the pyramid for 10 points. In addition to offense, the robot’s large arm could also be used for defensive purposes by blocking the shots of opposing robots.
Los Angeles Regional





Rank 30
Record: 4-4-0
On March 21, 22, and 23, Team 4201 returned to the Long Beach Convention Center to compete in the Los Angeles Regional for their second time. The robot had a few small and unexpected issues passing inspection regarding bumpers, but minor adjustments were made that allowed Leo 2.0 to be ready for competition.
Team 4201 was able to successfully shoot the Frisbees during the competition. An unforeseen design flaw involving the width of the arm’s opening, however, made it extremely difficult for the human player to feed new Frisbees, eating up time and causing the team to perform differently than expected. In the end, the team was able to win half its matches and finished the competition ranked 30th. The competition provided an excellent learning experience for the team, preparing a large number of new members about to take over the team’s leadership for the coming seasons.
Team 4201 was met with a number of issues during the competition that had also been present at the Los Angeles Regional. The width of the arm’s opening made feeding Frisbees difficult, cutting the number of scoring runs considerably. In addition to this, the bands that were used to move the Frisbees to the shooter were worn out, making shooting relatively slow and unreliable. We were able to fix these problems nearing the end of the competition, but the team was unable to advance into the final rounds. The event, however, provided valuable experience for the new leadership team as well as the new drivers, who will be taking the wheel during the 2014 competition season.