2022 Rapid React
The Challenge
2022 Rapid React Game Animation
Team 4201 Robot Reveal:
Takeoff
Since the end of build season, Team 4201, the Vitruvian Bots, has done so much, and we are ecstatic to share!
Our first competition, the Orange County Regional competition was held at the OC Fairgrounds. We competed against 41 teams including 2 international teams! The three-day event was full of exciting matches, and our team was able to rank 5th with a record of 10-5-1.
We are also proud to announce that we secured our spot in the Houston World Championships by winning the Chairman’s Award for the 4th time in our history. The judges at the Orange County Regional were blown away by the impact our team has had on our participants and community. We were the team that was able to best demonstrate progress towards FIRST’s mission of transforming our culture.
Our Chairman’s team also presented to the judges about our team’s vision and impact throughout our history! We learned a lot from the other great teams at Championships and we are looking forward to continuing our mission of increasing the STEM opportunities in our community by creating the future innovators and leaders that will solve the world’s tough problems.
The Robot
Name: Takeoff
Weight:
Size:
Strategy: Picture is filler for now >


Houston Texas Championship
From April 20-23, we competed in the 2022 FIRST Championships! The Championship was full of intense matches and great teamwork. With one of the highest offensive power ratings in the Hopper division, we were selected as the first pick of Alliance 8! Our robot performed very well, and our alliance reached the quarterfinals.
Our Chairman’s team also presented to the judges about our team’s vision and impact throughout our history! We learned a lot from the other great teams at Championships and we are looking forward to continuing our mission of increasing the STEM opportunities in our community by creating the future innovators and leaders that will solve the world’s tough problems! Check out our Chairman’s video here!
Los Angeles Regional
The Los Angeles Regional competition was held at the Da Vinci Schools gym for the second time in a row. We hosted 42 teams including 2 international teams. With several exciting matches and team work, our alliance was awarded the Regional Finalist Award! Our robot (Takeoff) was ranked 4th and had the most consistent autonomous sequence of the competition. Our ability to consistently sink 5-balls into the upper hub helped us receive the Autonomous Award for the second time in our team’s history!
Some key accomplishments from the Los Angeles Regional include winning the Autonomous Award, Regional Finalist, ranking #4 out of 42 teams, reaching the finals in Alliance #2 (with Team 4470 from Placentia, CA and Team 7157 from Brea, CA), and our alumna and mentor, Joy Uehara, winning the Woodie Flowers Finalist Award
__________________________________________________


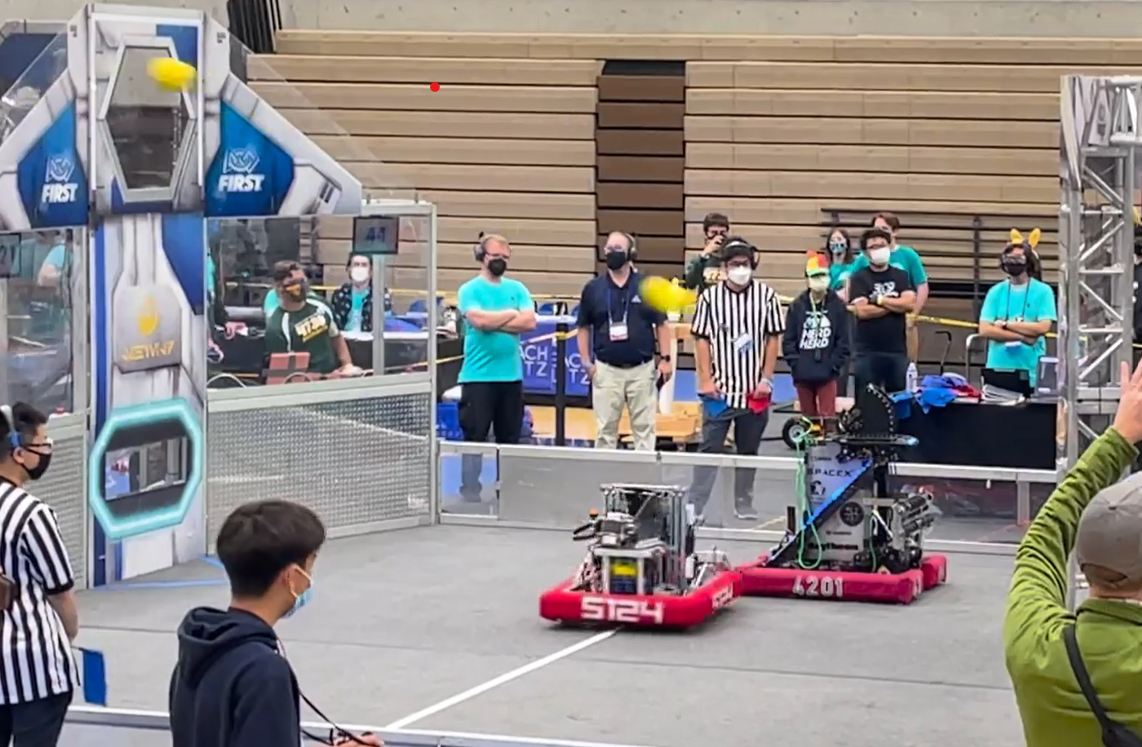
ORAnge County Regional
This year, the Orange County Regional competition was held at the OC Fairgrounds. We competed against 41 teams including 2 international teams! The three-day event was full of exciting matches, and our team was able to rank 5th with a record of 10-5-1. We were also proud to announce that we have secured our spot in the Houston World Championships by winning the Chairman’s Award for the 4th time in our history.
Some key accomplishments from the Orange County Regional this weekend include being the Regional Chairman’s Award winner, our robot ranking #5 out of 42 teams, reaching the semifinals in Alliance #3 (with Team 4123 from Bellflower, CA and Team 5199 from San Juan Capistrano, CA), and our team member, Luke S., becoming a Dean’s List Finalist
Beach Blitz



Swerve Drivetrain
This CAD model is of a simple Mk3 Swerve drive train, which contains 4 identically sized 2×1 metal extrusions. The extrusions use Julia’s Feature Scripts Tube Converter with a wall thickness of 0.0625 inches or 1/16th of an inch. It uses a 0.5 in hole pattern on the Y and X axis’ and a 1 inch hole pattern on the Z axis. This pattern uses 0.191 holes. The CAD model can be customized through editing the length value in “Extrusion Length” sketch in the “swerve editing” part studio. This is achieved through the use of the “equal” constraint tool on corresponding portions of the 2×1 extrusions.
*Note that the square design of this drivetrain is due to the use of swerve symmetry, it’s shape will allow of a more efficient swerve based design over a standard tank-like rectangle shape. In addition, it uses 4 identically sized extrusions instead of a standard 2 different types of repeating extrusions. The reason for this is because it will make it easier for the user to edit the design for a square swerve. Regardless, its end configuration is ultimately up to the user, and this is just meant as a starting point. Have fun designing!
West Coast Products Tank Parameterized Drivetrain
This CAD model is of a simple West Coast Products (WCP) tank drive train, which contains two copies of two different sized 2×1 metal extrusions and one 1×1. The extrusions use Julia’s Feature Scripts Tube Converter with a wall thickness of 0.125 inches or 1/8th of an inch. It uses a 0.5 in hole pattern on the Y and X axis’ and a 1 inch hole pattern on the Z axis. This pattern uses 0.196 holes. The CAD model can be customized through editing the length values on the top and right sides of the model in “Frame perimeter” sketch in the “Chassis” part studio.
*Note that the model contains 2 rectangle-esc cut-outs, a circle cut out, and a square cut out on the longer of the 2×1 bars. this are for wheel, motor, and crossbar attachment. This model also contains parts for electronics such as a battery or radio mounts, which can be moved and removed at the uses need. Regardless, its end configuration is ultimately up to the user, and this is just meant as a starting point. Have fun designing!